
We are excited to announce that our paper “PRIMU: Uncertainty Estimation for Novel Views in Gaussian Splatting from Primitive-Based Representations of Error and Coverage” has been accepted at the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2026, one of the leading international conferences in computer vision.
The work was developed as part of the EFRE-funded project Just Scan It 3D and is a collaboration between researchers from the University of Wuppertal, the University of Osnabrück, and Queensland University of Technology. The authors are Thomas Gottwald, Edgar Heinert, Peter Stehr, Chamuditha Jayanga Galappaththige, and Matthias Rottmann.
The paper introduces PRIMU, a framework for estimating predictive uncertainty in Gaussian Splatting (3DGS), a modern approach for high-quality 3D scene reconstruction and novel view synthesis. While Gaussian Splatting can produce visually convincing renderings of previously unseen viewpoints, it is often unclear whether the generated images and depth estimates are actually reliable. This lack of reliability estimates can be problematic when the technology is used in automated or safety-critical systems.
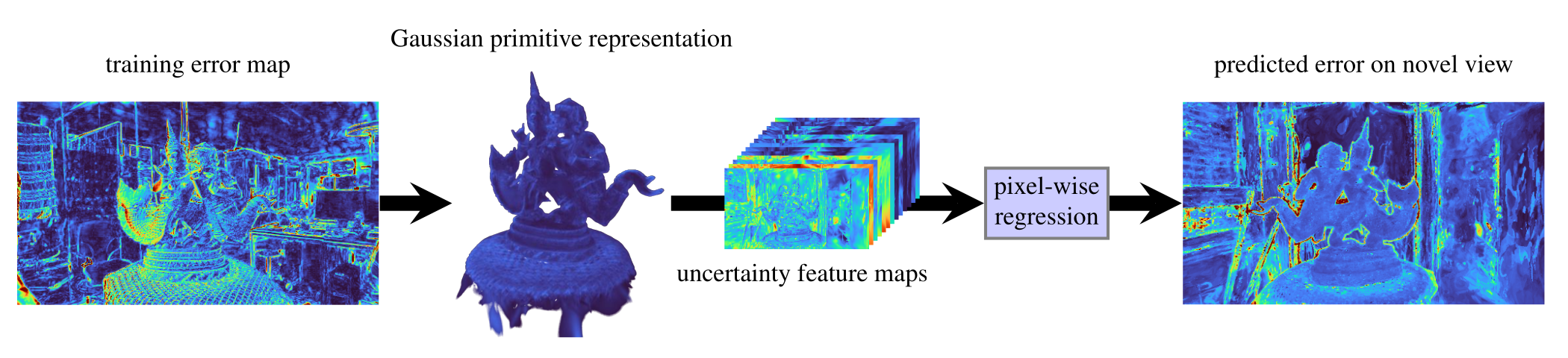
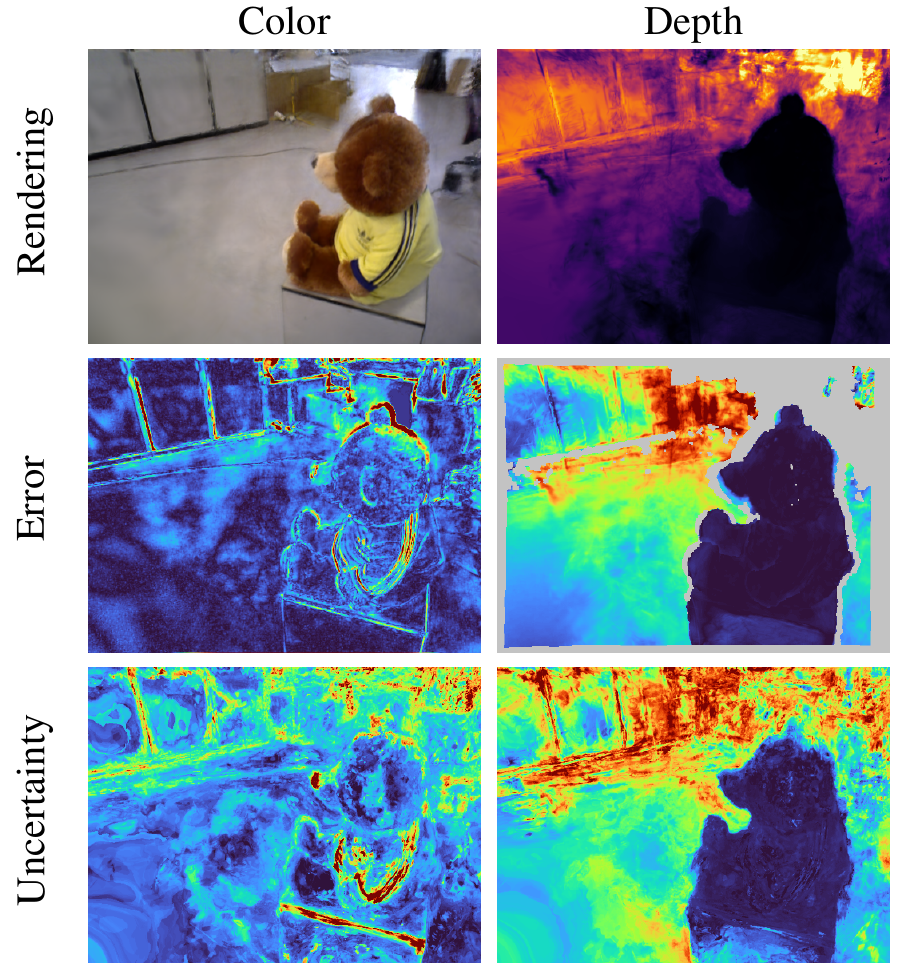
PRIMU addresses this challenge by constructing primitive-based representations of reconstruction error and observation coverage directly on the Gaussian primitives that form the 3D scene representation. These representations can be rendered from arbitrary viewpoints to generate uncertainty feature maps, which are then used to predict where rendering errors are likely to occur. In this way, the method provides spatially resolved uncertainty estimates for both color renderings and depth predictions.
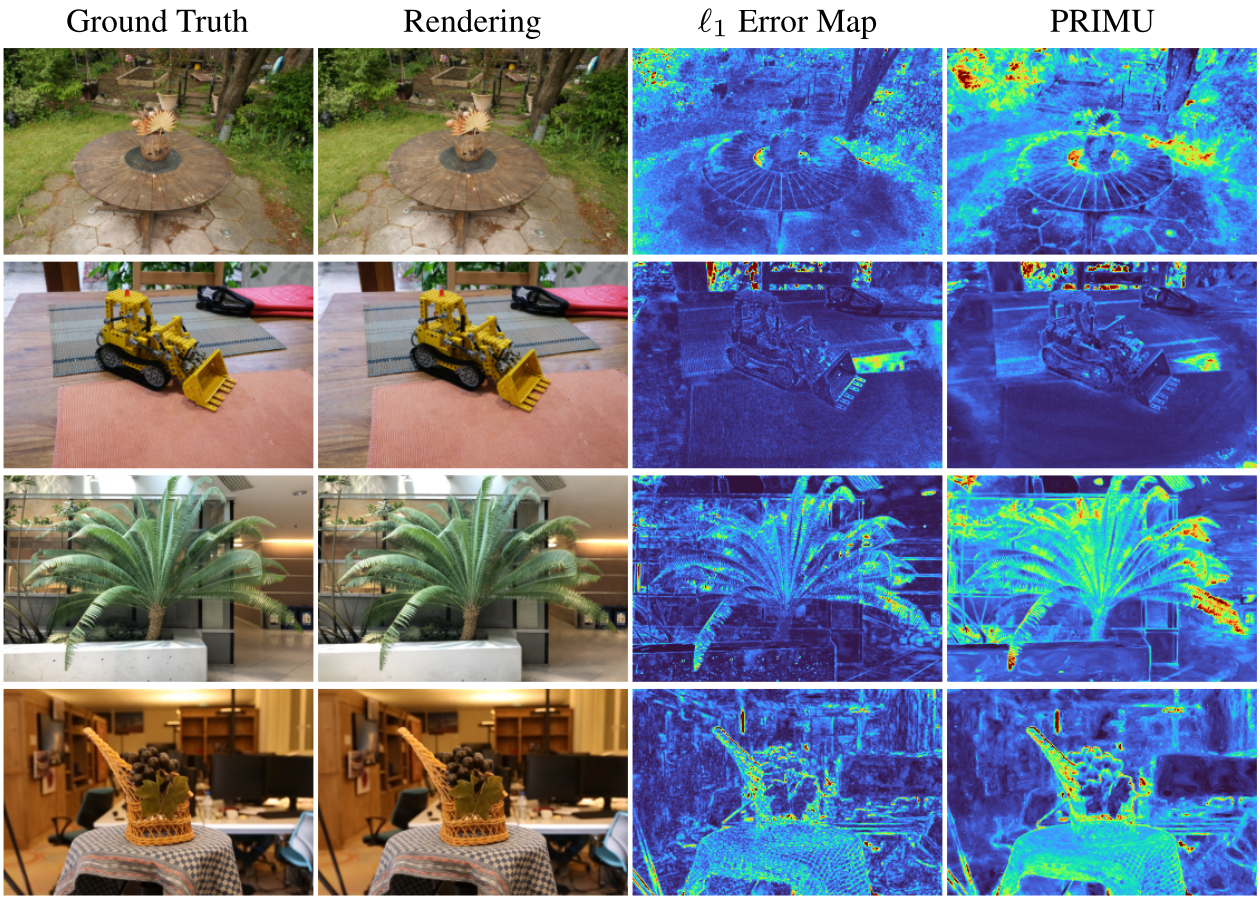
Experimental results show that PRIMU achieves state-of-the-art performance for uncertainty estimation in Gaussian Splatting, outperforming existing approaches while operating purely as a post-processing step that does not require retraining the 3D model. The estimated uncertainties strongly correlate with true rendering errors and generalize well to unseen views and scenes.
Reliable uncertainty estimates are crucial for many downstream tasks relevant to the Just Scan It 3D project. These include active view selection, where a system automatically determines which additional camera views would improve a reconstruction, as well as applications such as change/anomaly detection in 3D scenes.
With this work, the project contributes an important step toward more trustworthy and autonomous 3D reconstruction systems, enabling machines not only to reconstruct the world in 3D but also to assess the reliability of their predictions.
The paper will be presented at CVPR 2026, where we look forward to discussing the results with the international computer vision community. More information is available on the official Website.
{kind=link}
{kind=link}
{kind=link}
{kind=link}